معرفی و عیب یابی سیستم مالتی پلکس خودرو سمند
هوشمند شدن فرامین برقی و الکترونیکی در خودرو با استفاده از ارسال یکسری کد در شبکه، باعث میشود که خودروساز بتواند علاوه بر تسهیل فرایند عیبیابی و کمک به بخش خدمات پس از فروش، عملکردها و حالات و یا همان فیچرهای مختلف را برای رفاه، ایمنی و امنیت راننده و سرنشینان طراحی کرده و مهیا سازد.
آموزش مالتی پلکس
معرفی شبکه مالتی پلکس
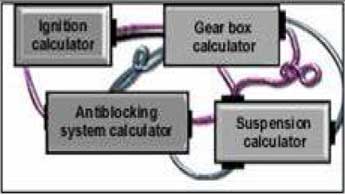
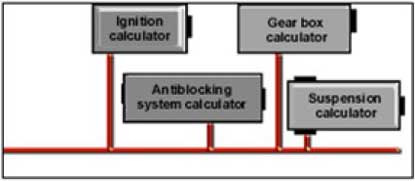
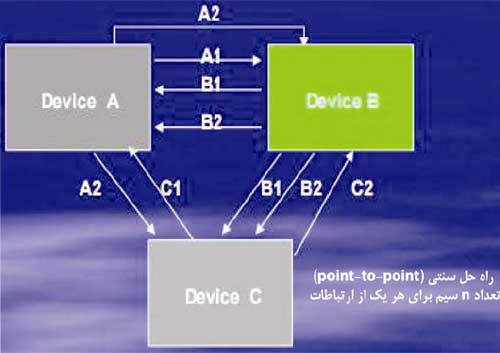
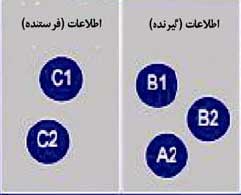
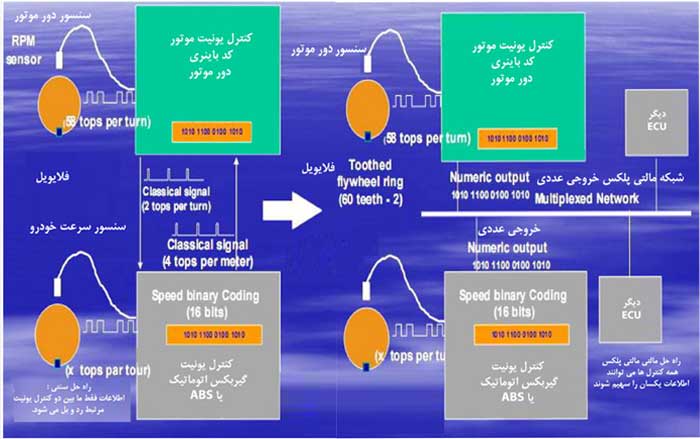
به منظور اتصال حداقل ۳ واحد الکترونیکی (ECU) در خودرو با توجه به اینکه روش های موجود (point-to-point) توانایی کافی برای برقراری ارتباط مناسب این ECUها را ندارد جهت برقراری اتصال این ECUها به یکدیگر از شبکه مالتی پلکس استفاده می شود.
|
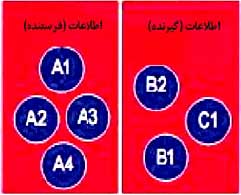
(اتصال شبکه ای) (network communication) |
(اتصال point-to-point) (point-to-point communication) |

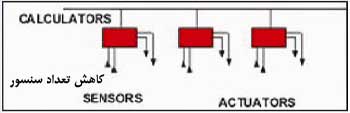
توجه: شبکه مالتی پلکس دسته سیم ها را حذف نمی کند، فقط تعداد سیم ها را کاهش می دهد.
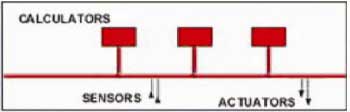
معایب اتصال نقطه به نقطه (point-to-point)
- نیازمند برقراری مسیر اختصاصی برای هر بار الکتریکی و هر سیستم
- پیچیدگی دسته سیم ها (مشکل جانمایی (packaging) – مشکل سختی مونتاژ)
- افزایش تعداد اتصال دهنده های دسته سیم ها و سیستم ها (connectors)
- روش محدود و زمان بر عیب یابی سنتی
- مشکل اضافه کردن ویژگی های جدید (new features) به خودرو
- افزایش وزن که منجر به افزایش مصرف سوخت آلایندگی می شود.
 |
 |
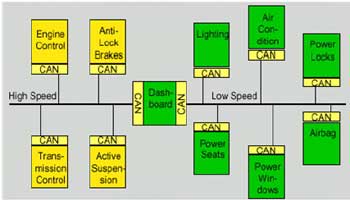
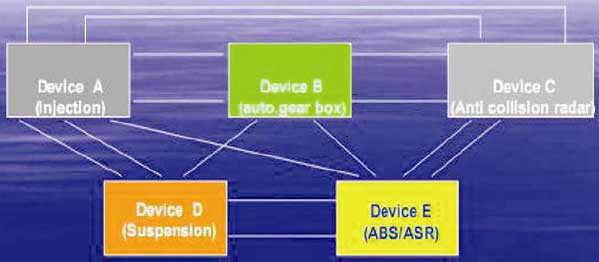
مزایای شبکه مالتی پلکس – شبکه داخلی خودرو (In Vehicle Neworking)
- کاهش هزینه های خودرو
- حذف سنسورها و تجهیزات الکترونیکی
- مشابه (اشتراک اطلاعات و اشتراک سیستم ها)
- کاهش حجم دسته سیم و اتصالات مرتبط با آن
- افزودن آسان قابلیت ها و ویژگی های خودرو
- استفاده از میکروکنترلرها در بخش های مختلف خودرو و امکان پیاده سازی بسیاری از قابلیت ها
- استفاده از حافظه های الکترونیکی در بخش های مختلف خودرو و امکان نگهداری امکانات اطلاعات
- صرفه جویی در زمان مونتاژ و خدمات پس از فروش
- عیب یابی آسان و سریع به دلیل تعداد کمتر سیم ها و اتصال دهنده ها
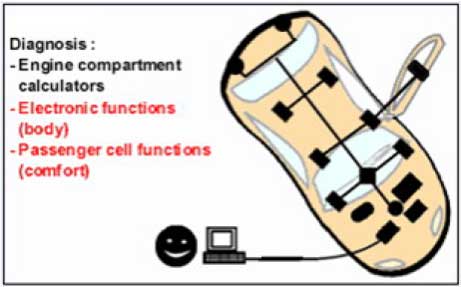
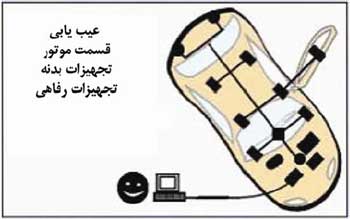
- امکان استفاده از تجهیزات عیب یاب الکترونیک برای عیب یابی کل شبکه
- پیچیده نبودن ساختار دیسته سیم
- افزایش سرعت و راحتی نصب تجهیزات
- نگهداری، سرویس و ارتقاء آسان تر خودرو
مزایای شبکه مالتی پلکس
|
|
 |
 |
 |
 |
 |
 |
|
Device C
|
Device B
|
Device A
|
 |
 |
|


مزایای شبکه مالتی پلکس
اشکالات موجود در اتصال نقطه به نقطه در خودرو سمند
- موقعیت نامناسب نصب جعبه فیوز
- مونتاژ دسته سیم داشبورد در خط تولید
- عدم دریافت توان الکتریکی کافی جهت عملکرد (مناسب بارهای توان بالا مانند شیشه بالابر)
- عدم مدیریت مصرف توان الکتریکی در خودرو
- مشکلات فراوان به هنگام عیب یابی (تعداد زیاد رشته سیم ها و انشعاب ها)
- سختی مونتاژ دسته سیم front (حجیم – سنگین – انعطاف پذیر – ضخیم – آسیب پذیر - زمانبر)
- نیاز به تغییرات سخت افزاری فراوان به هنگام نصب سیستم های جدید الکترونیکی (مانند ESP )
- هزینه های زیاد سربار در فرآیند تولید

مزایای پروژه مالتی پلکس در خودرو سمند
- کاهش وزن خودرو (حدود 8 کیلوگرم)
- کاهش زمان مونتاژ (حدود 15 دقیقه)
- تست و تعمیرات راحت و آسان خودرو در انتهای خط تولید و خدمات پس از فروش
- امکان استفاده از سیستم های جدید (نظیر گیربکس اتوماتیک، ABS و ...)
- افزایش Flexibility (در خصوص افزایش و یا کاهش امکانات خودرو)
- کاهش جریان مصرفی خودرو و در نتیجه افزایش طول عمر باتری (از 200 میلی آمپر به حدود 8 میلی آمپر)
- افزایش طول عمر لامپ ها (با استفاده از روش PMW در روشن نمودن لامپ ها)
- قابلیت اطمینان بیشتر سیستم (Reliability) و کیفیت سیستم الکترونیک خودرو
- امکان هماهنگ کردن نشان دهنده سرعت و کیلومتر شمار با رینگ خودرو (قابل تنظیم برای رینگ های مختلف)
- امکان استفاده از سیستم های ترمز ABS مختلف بدون هیچگونه تغییراتی در دسته سیم خودرو
- امکان نمایش سیستم های رهیاب بر روی جلو آمپر
- عدم امکان صفر کردن کیلومتر شمار
- استایل جدید
- حفاظت بهتر بارهای الکتریکی و سیم ها در برابر اتصال کوتاه
- قابلیت استفاده از سوئیچ ها و قطعات با توان پایین و کاهش قیمت این قطعات
- قابلیت نمایش خطاهای بوجود آمده در خودرو
- آمادگی سیستم الکترونیک خودرو برای پذیرش فانکشن های جدید
- مدیریت مصرف توان الکتیکی در خودرو
- رفع محدودیت استفاده از قطعات خودرویی مجهز به کاربر خودرو
- قابلیت به روز کردن فانکشن ها
- حذف خطاهای طراحی سیم کشی نقطه به نقطه
- کاهش تعداد کانکتورها و اینتر کانکتورها
- کاهش حجم و قیمیت دسته سیم ها
- کاهش وزن خودرو که باعث مصرف سوخت و کاهش آلایندگی می گردد.
- کاهش پیچیدگی دسته سیم ها
- آسان شدن پیاده سازی سیستم های جدید
تعاریف و مفاهیم در شبکه مالتی پلکس
در این قسمت به تعریف تشریح مختصر پاره ای از تعاریف و مفاهیم که در شبکه های مالتی پلکس کاربرد دارند، می پردازیم.
Node
به معنای گره و به هر مدول سخت افزاری که حداقل شامل یک واسط جهت اتصال به شبکه و انتقال اطلاعات می باشد اطلاق می گردد.
BUS
به معنای گذرگاه و به مسیر مشترک بین دو یا چند گره جهت تبادل اطلاعات گفته می شود.
حالت Recessive
حالت مغلوب در یک شبکه CAN
حالت Dominant
حالت مغلوب در یک شبکه CAN
Recessive Bit
وضعیت بیت بر روی خطوط باس CAN که بیانگر حالت Recessive می باشد. این بیت، مقدار یک منطقی را دارد.
Dominant Bit
وضعیت بیت بر روی خطوط باس CAN که بیانگر حالت Recessive می باشد. این بیت، مقدار صفر منطقی را دارد.
زمان تاخیر
مدت زمانی که طول می کشد تا یک پیام از یک انتهای شبکه به نقطه مقابل در انتهای دیگر برسد. در پروتکل CAN، این مقدار برابر با فاصله زمانی بین دو رویداد درخواست ارسال پیام و آغاز زمان ارسال بر روی باس می باشد.
Multi Master
در یک شبکه مالتی پلکس می توان گره ها را به دو دسته Slave و Master تقسیم بندی کرد. یک گره Master بدون اینکه از سوی گره دیگری درخواست شود می تواند به طور مستقل کنترل باس را در دست بگیرد و شروع به فرستادن اطلاعات کند. از این نمونه می توان PLC و PC را نام برد. گره های Salve نوعا شامل شیرها، درایوها و حسگرهای اندازه گیری هستند. این گره ها نمی توانند به طور مستقل کنترل باس را در دست بگیرند و فقط می توانند خبر رسیدن پیام دریافت شده را اعلام کنند و یا وقتی که یک Master از آن ها تقاضای ارسال پیام می کند، شروع به فرستادن یک پیام کنند.
در پروتکل CAN، کل گره ها از نوع Multi Master هستند. زیرا همه گره ها از نظر برقراری ارتباط و ارسال اطلاعات با دیگر گره ها یکسان بوده و می توانند خود به عنوان یک Master عمل می کنند.
استانداردهای شبکه مالتی پلکس
با ضرورت استفاده از شبکه مالتی پلکس در خودرو آشنا شدید و دانستید که شبکه مالتی پلکس یک شبکه انتقال داده (Data Transfer Network) بین سیستم ها و یونیت های الکترونیکی در خودرو می باشد. بدیهی است که پیاده سازی چنین شبکه ای به تمهیدات سخت افزاری و نرم افزاری ویژه ای جهت انتقال داده ها و فرامین نیاز دارد.
ازابتدای پیدایش ایده شبکه مالتی پلکس و تحقق سیستم های اولیه تا کنون، شبکه ها و پروتکی های مختلفی به کار گرفته شده اند که هرکدام حوزه کاربرد، مزایا، معایب و محدودیت خاص خود را دارند.
با رونق گرفتن شبکه مالتی پلکس، استانداردهای گوناگونی جهت کاربردهای مختلف شبکه مالتی پلکس در خودرو توسط سازمان های استاندارد به ثبت رسیده است. از آنجایی که تمام قابلیت های الکترونیکی خودرو و سرویس دهی به آن ها از اولویت سرویس دهی یکسان برخوردار نیستند لذا وجود یک استاندارد جهانی برای تعریف و طبقه بندی کاربردها و سرویس دهی گوناگون به سیستم ها و فانکشن های خودرو احساس می شود.
استفاده از سیستم های مالتی پلکس جهت انتقال داده های سیستم های الکترونیکی خودرو از طریق گذرگاه انتقال داده ها (Data Bus) به اواخر 1970 باز می گردد. ابتدا امید بر آن بود که یک پروتکل بتواند تمام نیازمندی های خودرو را پوشش دهد اما با توجه به طیف گسترده نیازمندی ها و کاربردهای مختلف سیستم های خودرو، این ایده به طبقه بندی کلاس های (SAE (Society Automotive Engineers و اینکه پیاده سازی حداقل سه پروتکل و یا شبکه مورد نیاز است، تحقق یافت. در سال 1995 نیاز به وجود باس های چندگانه (Multi BUS) در خودرو پدیدار شد. در پیدایش این نیاز، مسئله هزینه و سبک و سنگین کردن ان نقش ویژه ای داشت.
برطبق تقسیم بندی موسسه SAE، حداقل 8 شبکه داخلی خودرو یا IVN (In-Vehicle Network) تا سال 2013 ضروری است.
این شبکه ها عبارتند از:
Class A , Class B , Class C , Emissions / Diagnostic , AirBag , Mobile Media , X-by-Wire , Wireless
تذکر: برخی منابع، کلاس های SAE را به ۴ گروه تقسیم بندی می کنند و ۵ کلاس آخر را در یک گروه به نام کلاس D قرار می دهند.
| APPLICATION | SPEED | SAE NETWORK CLASS |
| convenience features - crunk release, door locks, electric mirror adjustment, etc | < 10 kb/s | CLASS A |
| General Information transfer (HVAC, Instruments, power windows, etc) | 10 - 125 kb/s | CLASS B |
| Real time control (power train, vehicle dynamics, engine control, etc) | 125 kb/s - 12 Mb/s | CLASS C |
| Multimedia and safety - critical applications (Internet, digital tv, x-by-wire) | > 1 Mb/s | CLASS D |
هر کاربردی در خودرو به پروتکل اختصاصی خود و یک یا چند شبکه که بر روی آن پروتکل بنا نهاده شده است، نیاز دارد. گاهی اوقات علت انتخاب یک شبکه خاص به دلایل ایمنی انجام می گیرد. مثلا AirBag یا X-by-Wire اما با صرف نظر کردن ازتقسیم بندی فانکشن های خودرو، در حال حاضر کلاس های مستقل و مجزایی از سیگنال ها داریم که در شبکه یا شبکه های خودرو با یکدیگر ارتباط دارند.
طبقه بندی کلاس های SAE به شرح زیر است:
کلاس A
پروتکل های تعریف شده در این کلاس برای انتقال اطلاعات با مصارف عمومی (General Purpose) در محدود الکتریکی و الکترونیکی بدنه خودرو جهت ارتباط گره های ساده و غیر هوشمند (Nonintelligent) مانند سوئیچ ها، کنترل موقعیت صندلی، شیشه بالابر برقی، قفل مرکزی، لامپ ها، کنترل موقیت آئینه و ... مورد استفاده قرار می گیرند.
به دلیل اینکه اطلاعات رد و بدل شده نوعا بسیار کوتاه و میزان تازه سازی (Updating) این گونه اطلاعات نسبتا پایین است، نرخ ارسال داده ها (Bit Rate) برای پروتکل های موجود در این کلاس نسبتا پایین و کمتر از 10 kb/s است. هزینه پیاده سازی در این کلاس ناچیز و بین 0.5 $ و 1 $ برای هر گره است که عمدتا شامل قطعات نیمه هادی (مانند میکرو کنترلر یا فرستنده گیرنده (Transceiver)، نرم افزارها، اتصال دهنده ها (Connectors) و ...) می باشد.
تذکر:
هزینه پیاده سازی برای هر کلاس صرفا براساس یک محاسبه ساده و سطحی حاصل شده است و تنها به عنوان یک ملاک مقایسه با کلاس های دیگر بایستی در نظر گرفته شود.
اغلب پروتکل های کلاس A از نوع UART (Universal Asynchronous Receiver Transmitter) هستند. UART بسیار ساده و از نظر پاره سازی، اقتصادی و به صرفه است. بسیاری از میکروکنترلرها دارای مدول داخلی SCI (Serial Communication Interface) جهت تحقق UART هستند (مانند TMS470R1B1M- تگزاس اینسترومنت) در غیر این صورت می توان از یک مدول URAT در کنار میکروبرسسور استفاده کرد. مدار فرستنده / گیرنده (Transceiver) در کلاس A، کوچکتر و ارزانتر از انواعی است که در سایر پروتکل ها استفاده می شود.
در جدول تعدادی از ویژگی های (Attributes) عمده پروتکل های کلاس A با یکدیگر مقایسه شده است. تنها پروتکل استاندارد کلاس A، پروتکل LIN (Local Interconnect Network) نام دارد. این پروتکل حاصل همکاری 5 شرکت خودروساز BMW، Cherysler-Damiler، Volvo، Volks Wagen، Audi شرکت سازنده قطعات نیمه هادی Motorola و شرکت Volcano Communication Tecnologies است که اولین کاربرد تحت توسعه آن در خودرو در سال 2001 محقق شد.
انتظار می رود LIN با رشدی معادل 3 تا 10 گره برای هر خودرو و 2/1 میلیارد گره در سال (در سطح جهانی) مواجه شود.
کلاس B
کاربرد پروتکل های این کلاس در انتظار اطلاعات غیر بحرانی (Non - Critical) با سرعت 10 kb/s تا 12 kb/s می باشد.
کاربردهایی از قبیل:
- اطلاعات پشت آمپر (Insrument Cluster)
- سرعت خودرو
- داده های مرتبط با آلاینده های موتور
- تهویه مطبوع (Air Conditioning)
پروتکل های این کلاس باید کاربردهای event-drive و انتقال پیام های پریود یک به همراه قابلیت های sleep/wakeup را پشتیبانی کنند. پروتکل های رایج این کلاسش، CAN (در اروپا) و 1850 J (در آمریکا) می باشند. هزینه پیاده سازی پروتکل های کلاس B در حدود 2 دلار برای هر گره می باشد.
کلاس C
از پروتکل های این کلاس برای انتقال اطلاعات بحرانی بلادرنگ (Real Time) با سیکل زمانی 1ms تا 10ms در زمان تاخیر پیام (Massage Latency) کنتر از 1ms استفاده می شود.
کاربردهایی نظیر:
- کنترل موتور
- سیستم کنترل گیربکس
- کنترل تعادل و پایداری خودرو
نرخ ارسال داده در محدوده 1kb/s تا 125kb می باشد. هزینه پیاده سازی برای هر گره از 3$ تا 4$ است. از بین پروتکل های جدول پروتکل j1939 به طور مشترک برای کلاس های C و B در کاربردهایی برای وسایلی نظیر کامیون، اتوبوس، ماشین آلات ساختمانی و راهسازی، کشاورزی، دریایی و دیگر صنایع استفاده می شود در حالی مه در اکثر خودروهای سواری از پروتکل ISO 11898 کلاس C با نرخ ارسال داده 500kb/s استفاده شده است. لازم به ذکر است که تفاوت عمده بین CAN در کلاس B و CAN در کلاس C در مشخصات گره های وصل شونده به شبکه و لایه فیزیکی پروتکل می باشد.
سازمان جهانی استاندارد یا ISO تعریف بسیار شده و بیشتر عملی ارائه داده شده است. کلاس Low Speed یا کلاس B برای کاربردهای انتقال داده با سرعت کمتر از 125 kb/s که پروتکل CAN مربوط به این کلاس CAN – Low Speed بوده و در کلاس C برای کاربردهای انتقال داده با سرعت بیشتر از 125kb/s می باشد که پروتکل CAN مربوط به این کلاس CAN-High Speed می باشد.
دامنه پروژه مالتی پلکس بر روی خودرو سمند
دامنه پروژه:
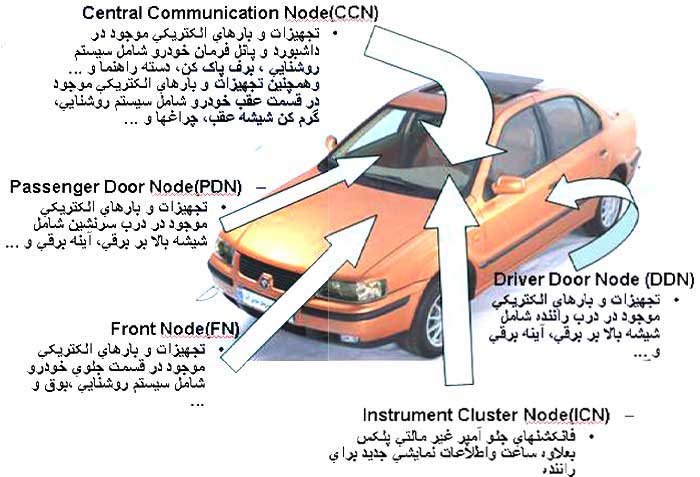
تجهیز خودروی سمند به شبکه بدنه با 5 نود (Node) الکترونیکی به نام های DDN, FN, CCN, ICN, PDN و تحت پروتکل CAN(Low Speed) مربوط به کلاس B می باشد.
|
تصویر نود FN |
تصویر نود CCN |
|
تصویر نود ICN |
تصویر نود PDN |





تصویر نود DDN
ساختار شبکه ای سمند مالتی پلکس
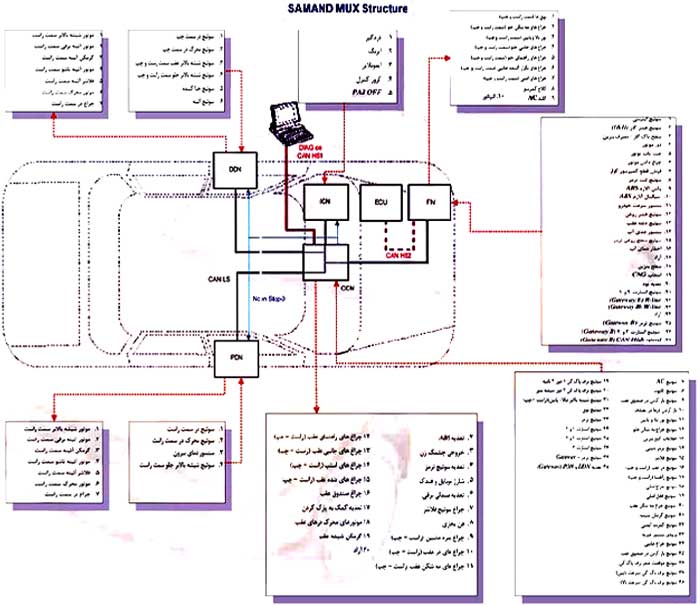
شماتیک دیاگرام
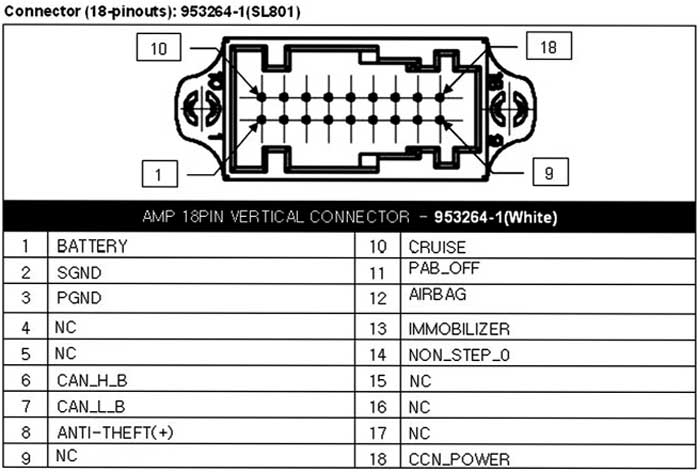
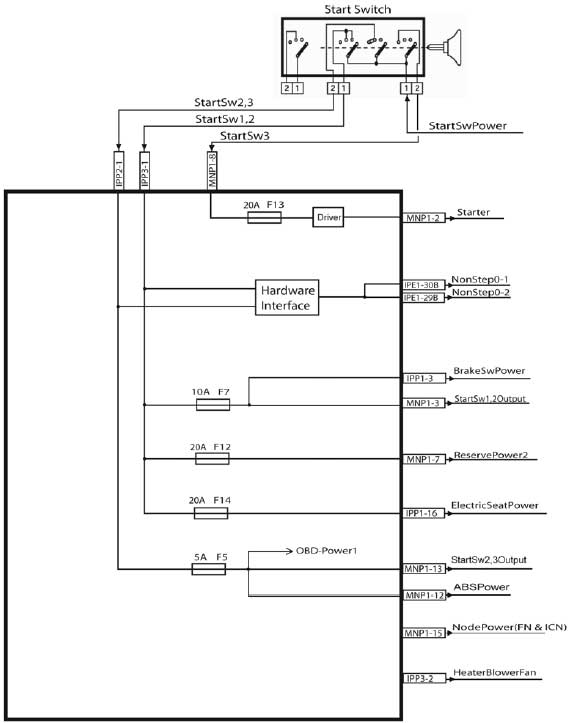
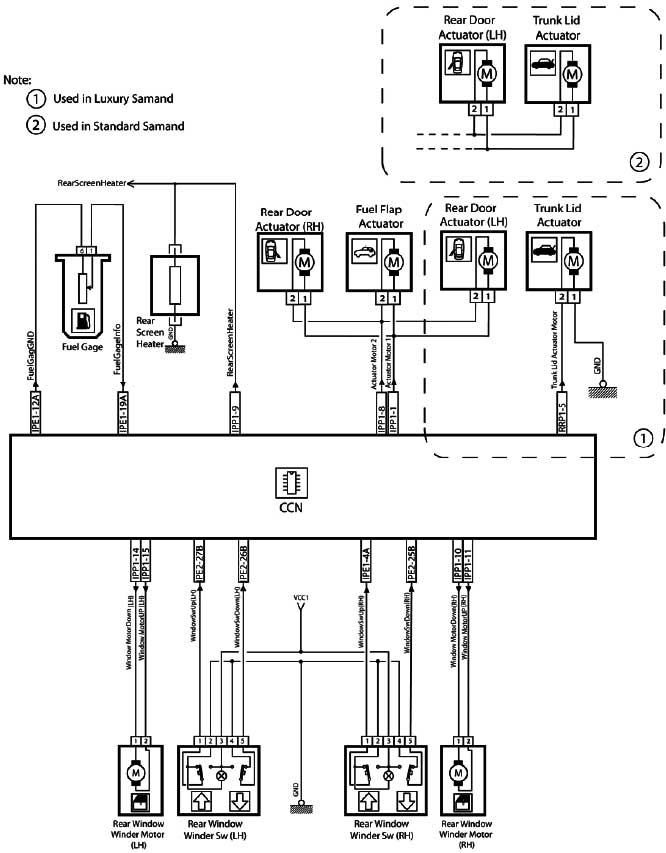
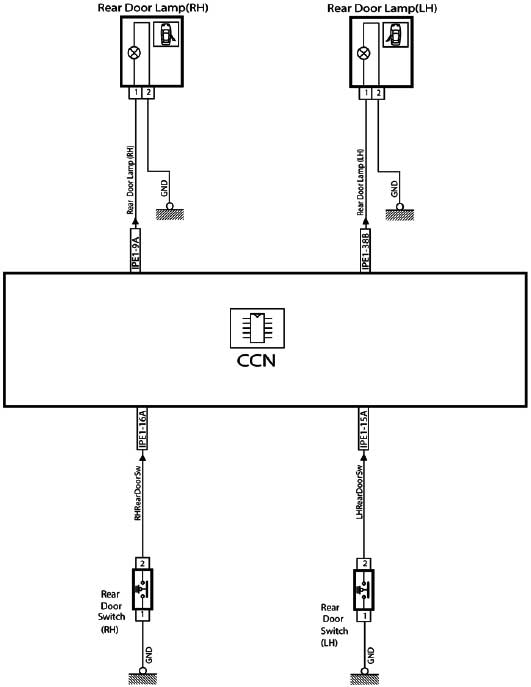
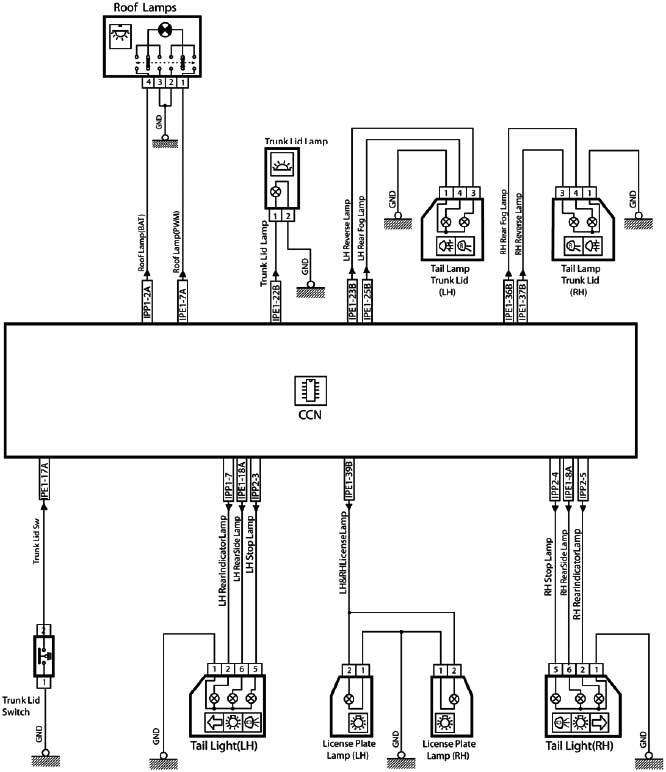
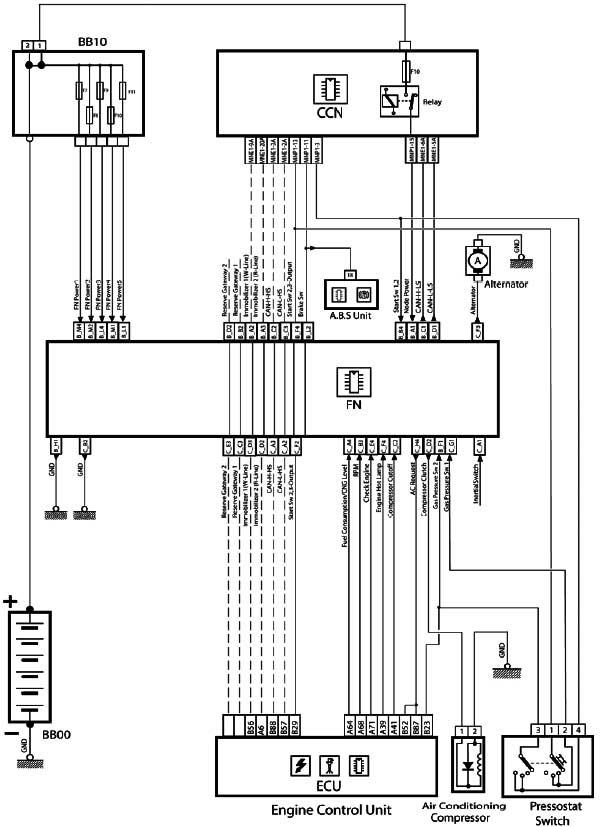
(Node CCN (Central Control Node
به همراه مشخصات کانکتورهای آن
Title: Wiring Schematic Diagram
(Subject: CCN (FuseBox
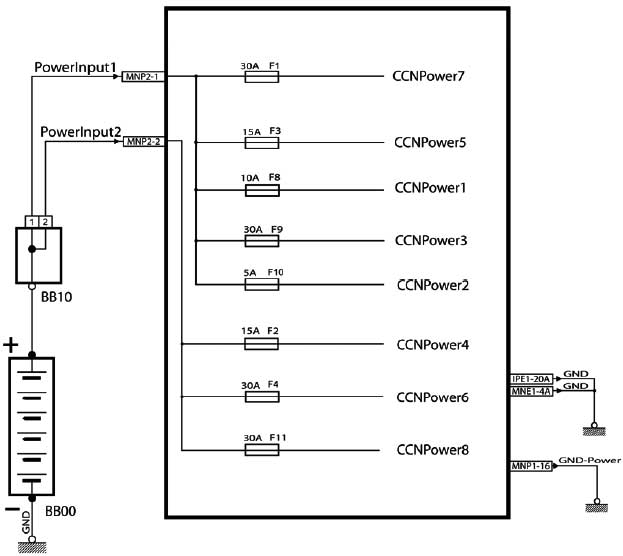
Title: Wiring Schematic Diagram
(Subject: CCN (FuseBox
Title: Wiring Schematic Diagram
Subject: CCN

Title: Wiring Schematic Diagram
Subject: CCN
Title: Wiring Schematic Diagram
(Subject: CCN (FuseBox
Title: Wiring Schematic Diagram
(Subject: CCN (FuseBox
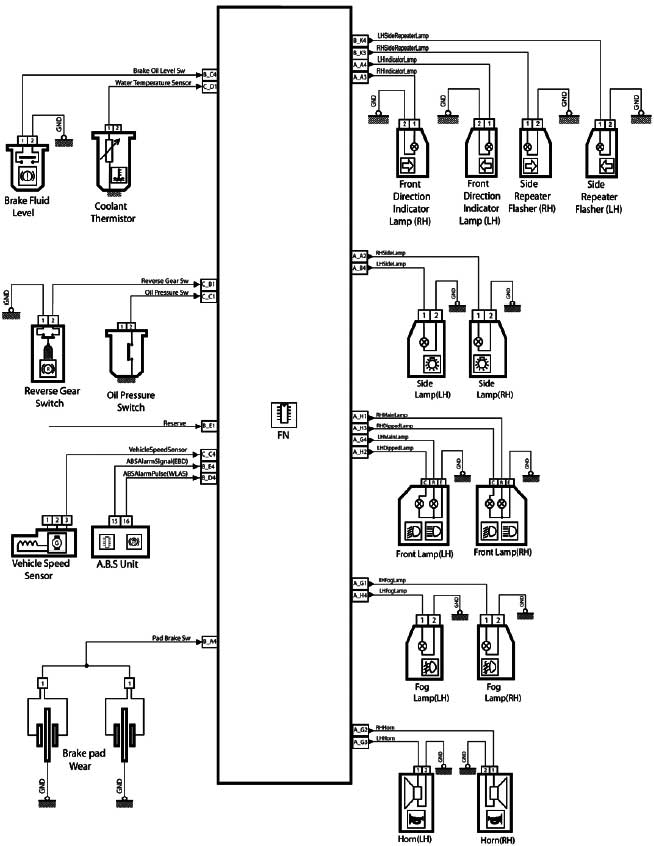
شماتیک دیاگرام (Node FN (font Node به همراه مشخصات کانکتورهای آن (Pin Configuration)
Title: Wiring Schematic Diagram
Subject: Front Node (FN)
Title: Wiring Schematic Diagram
Subject: Front Node (FN)_Siemens
Title: Wiring Schematic Diagram
Subject: Front Node (FN)_Siemens

Title: Wiring Schematic Diagram
Subject: Front Node (FN)_EF7
| Front Node Connector - Cavity A - 32 Pin | ||||||
| Description | I max/Theorica | Average Current | Input/Output | S/mm2 | Name of signal | No. |
| 8A | 5.5A | Output | 1.5 | DIPPED_LAMP_LH | A-H2 | |
| 8A | 5.5A | Output | 1.5 | DIPPED_LAMP_RH | A-H3 | |
| 8A | 5.5A | Output | 1.5 | MAIN_LAMP_LH | A-G4 | |
| 8A | 5.5A | Output | 1.5 | MAIN_LAMP_RH | A-H1 | |
| 3.2A | 0.5A | Output | 0.35 | SIDE_LAMP_LH | A-B4 | |
| 3.2A | 0.5A | Output | 0.35 | SIDE_LAMP_RH | A-A2 | |
| 8A | 5.5A | Output | 1.5 | FOG_LAMP_LH | A-H4 | |
| 8A | 5.5A | Output | 1.5 | FOG_LAMP_RH | A-G1 | |
| 4A | 2A | Output | 0.5 | INDICATOR_LAMP_LH | A-A4 | |
| 4A | 2A | Output | 0.5 | INDICATOR_LAMP_RH | A-A3 | |
| 6.4A | 4A | Output | 1 | HORN_LH | A-G3 | |
| 6.4A | 4A | Output | 1 | HORN_RH | A-G2 | |
| Front Node Connector - Cavity B - 48 Pin | ||||||
| Description | I max/Theorica | Average Current | Input/Output | s/mm2 | Name of signal | No. |
| 3.2A | 25mA | Input | 0.35 | ABS Alarm Pulse (WLAS) | B-D4 | |
| 3.2A | 10mA | Input | 0.35 | ABS Alarm Signal (EBD) | B-E4 | |
| 5.6A | 0.5A | Power Supply | 0.75 | Start_SW 1,2 | B-B4 | |
| 4A | 0.5A | Output | 0.5 | Side Repeater Lamp (LH) | B-K4 | |
| 4A | 0.5A | Output | 0.5 | Side Repeater Lamp (RH) | B-K3 | |
| 4A | 15mA | Input | 0.5 | Pad Brake Switch | B-A4 | |
| 4A | 15mA | Input | 0.5 | Brake Oil Level Switch | B-C4 | |
| 3.2A | 15mA | Input | 0.35 | Gas Pressure Switch I | B-G1 | |
| 3.2A | 15mA | Input | 0.35 | Gas Pressure Switch II | B-F1 | |
| 3.2A | 10mA | Input | 0.35 | Reserve1 | B_E1 | |
| 10.4A | 11A | Power Supply | 2 | FN-POWER1 | B-M4 | |
| 10.4A | 11.75A | Power Supply | 2 | FN-POWER2 | B-M2 | |
| 10.4A | 11A | Power Supply | 2 | FN-POWER3 | B-L4 | |
| 10.4A | 11.75A | Power Supply | 2 | FN-POWER4 | B-M1 | |
| 10.4A | 4A | Power Supply | 2 | FN-POWER5 | B-L1 | |
| 5.6A | 0.5A | Power Supply | 0.75 | Node Power | B-A1 | |
| 5.6A | 0.5A | GND | 0.75 | GND1 | B-H1 | |
| 3.2A | 0.5A | Input/Output | 0.35 | Can H-Low Speed | B_C1 | |
| 3.2A | 0.5A | Input/Output | 0.35 | Can L-Low Speed | B-D1 | |
| 3.2A | 0.5A | Gateway | 0.35 | CAN H-High Speed_B | B-A2 | |
| 3.2A | 0.5A | Gateway | 0.35 | CAN L-High Speed_B | B-A3 | |
| 5.6A | _ | Gateway | 0.75 | Start_SW_2,3_B | B-F4 | |
| 5.6 | _ | Gateway | 0.75 | Brake_sw_B | B-L2 | |
| 3.2A | 0.25A | Gateway | 0.35 | R_Line_B | B-C3 | |
| 3.2A | 0.25A | Gateway | 0.35 | W_Line_B | B-C2 | |
| 3.2A | 0.25A | Gateway | 0.35 | Reserve_Gateway_1B | B-B2 | |
| 3.2A | 0.25A | Gateway | 0.35 | Reserve_Gateway_2B | B-D2 | |
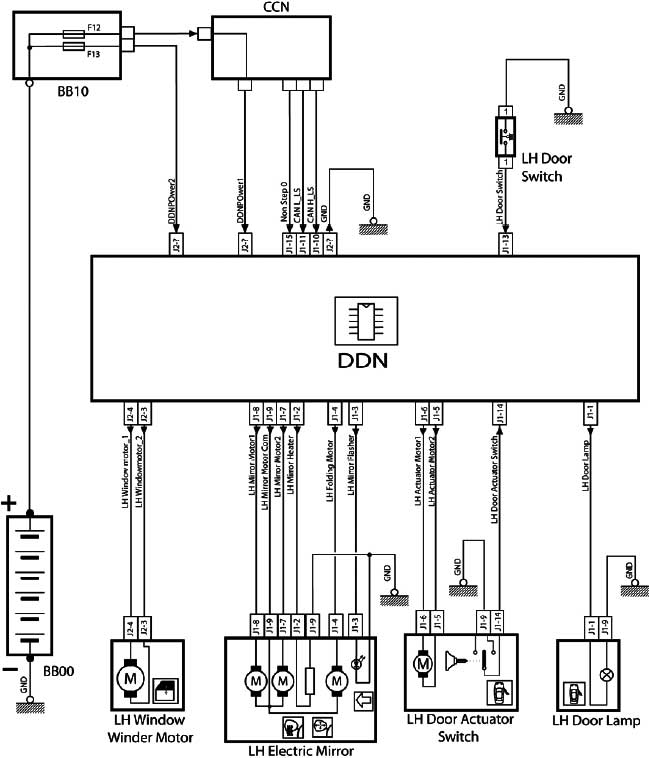
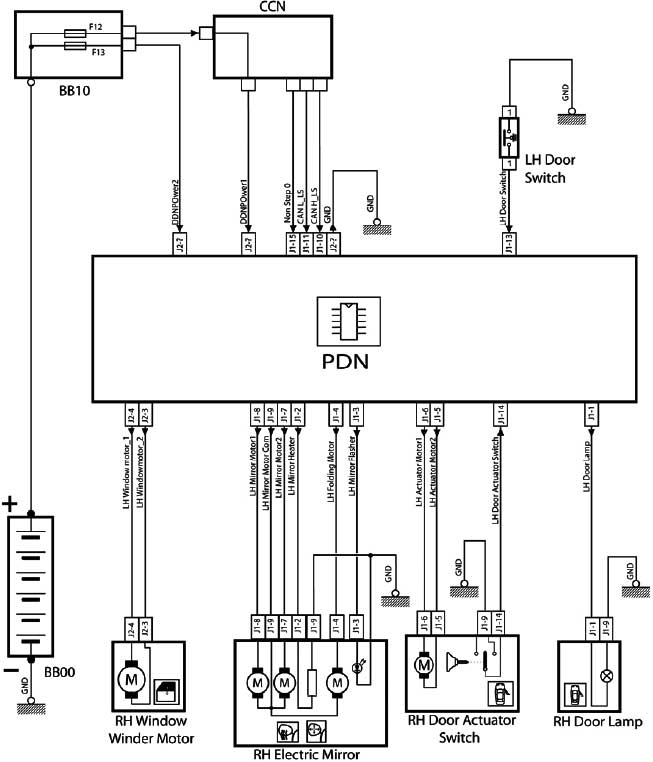
شماتیک دیاگرام Node DDN, PDN
به همراه مشخصات کانکتورهای آن (Driver Door Node) (Passenger Door Node)
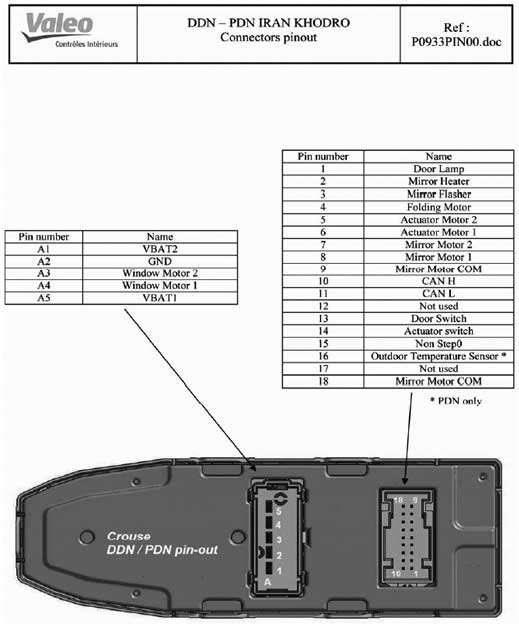
| Description | I max/t | Current | Input/Output | S/mm | Connector pir | Name of signal |
| signal | Input | 0.35 | J1-15 | NonStep0 | ||
| J1-16 | signal | Input | 0.35 | J1-16 | Outdoor Temperature | |
| signal | Input | 0.35 | J1-13 | Door switch | ||
| signal | Input | 0.35 | J1-14 | Actuator switch | ||
| signal | Input/Output | 0.35 | J1-11 | CAN L | ||
| signal | Input/Output | 0.35 | J1-10 | CAN H | ||
| 420 mA | Output | 0.35 | J1-1 | Door Lamp | ||
| 2.5Amp | 1.1Amp | Output | 0.35 | J1-2 | Mirror Heater | |
| Only For Maximum 1000ms | 2.5 Amp | Output | 0.35 | J1-6 | Actuator Motor 1 | |
| 2.5Amp | Output | 0.35 | J1-5 | Actuator Motor 2 | ||
| 200mA | Output | 0.35 | J1-9 | Mirror Motor Com | ||
| 200mA | Output | 0.35 | J1-8 | Mirror Motor 1 | ||
| 200mA | Output | 0.35 | J1-7 | Mirror Motor 2 | ||
| 300mA | Output | 0.35 | J1-3 | Mirror Flasher(LED) | ||
| 2Amp | 700mA | Output | 0.35 | J1-18(Com) | Mirror Floging Motor 2 | |
| 2Amp | 700mA | Output | 0.35 | J1-4 | Mirror Floging Motor 1 | |
| The maximum duration of Imax is 100ms | 30Amp | 10Amp | Output | 2 | J2-4 | Window Winder Motor 1 |
| 30Amp | 10Amp | Output | 2 | J2-3 | Window Winder Motor 2 | |
| 15Amp | Power Suppply | 2 | J2-2 | GND | ||
| Fuse value=40Amp | 29..57Amp | Power Suppply | 2 | J2-1 | VBAT2(F13) | |
| Fuse value=10Amp | 6.5Amp | Power Suppply | 1.5 | J2-5 | VBAT1(F12) |
| Description | I max/t | Current | Input/Output | S/mm2 | Connector pir | Name of signal |
| signal | Input | 0.35 | J1-15 | NonStep0 | ||
| signal | Input | 0.35 | J1-13 | Door Switch | ||
| signal | Input | 0.35 | J1-14 | Actuator Switch | ||
| signal | Input/Output | 0.35 | J1-11 | CAN L | ||
| signal | Input/Output | 0.35 | J1-10 | CAN H | ||
| 470mA | Output | 0.35 | J1-1 | Door Lamp | ||
| Only for maximum 1000ms | 2.5Amp | Output | 0.35 | j1-5 | Actuator Motor 2 | |
| 2.5Amp | Output | 0.35 | J1-6 | Actuator Motor 1 | ||
| 2.5Amp | 1.1Amp | Output | 0.35 | J1-2 | Mirror Heater | |
| 220mA | Output | 0.35 | J1-9 | Mirror Motor Com | ||
| 220mA | Output | 0.35 | J1-7 | Mirror Motor 2 | ||
| 220mA | Output | 0.35 | J1-8 | Mirror Motor 1 | ||
| 300mA | Output | 0.35 | J1-3 | Mirror Flasher (LED) | ||
| 2Amp | 700mA | Output | 0.35 | J1-18(Com) | Mirror Folding Motor 2 | |
| 2Amp | 700mA | Output | 0.35 | J1-4 | Mirror Folding Motor 1 | |
| The maximum duration of Imax is 100ms | 23Amp | 7Amp | Output | 1.5 | J2-3 | Window Winder Motor 2 |
| 23Amp | 7Amp | Output | 1.5 | J2-4 | Window Winder Motor 1 | |
| 15Amp | Power Supply | 2 | J2-2 | GND | ||
| Fuse value = 40 Amp | 15Amp | Power Supply | 2 | J2-1 | VBAT2(F13) | |
| Fuse value = 10 Amp | 3.5Amp | Power Supply | 1.5 | J2-5 | VBAT2(F12) |
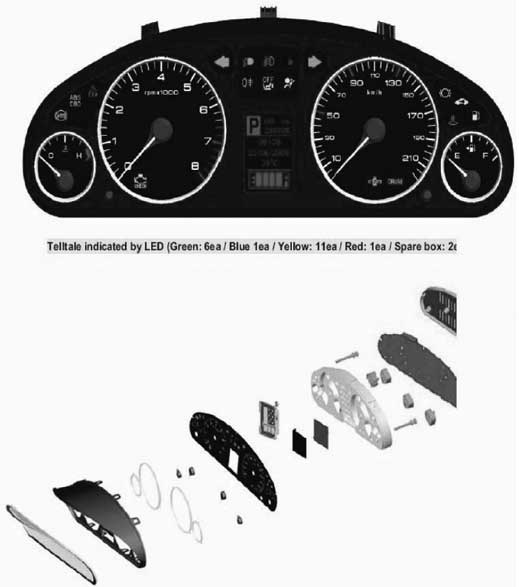
نود ICN
(Instument Control Node)